Moller events No Solenoid
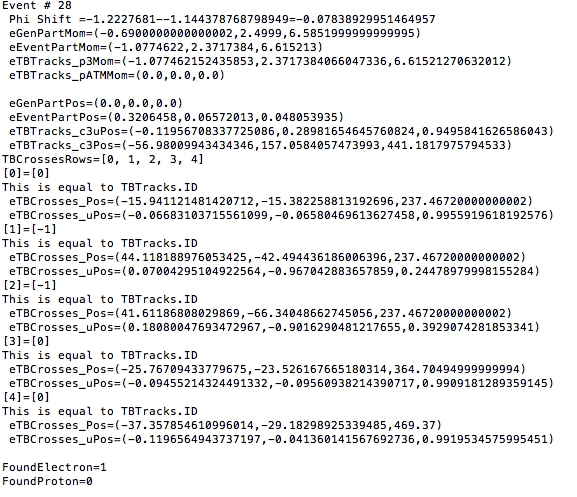
LUND file with Moller events (with origin of coordinates occurring at each event)
2 1 1 1 1 0 0.000563654 3.53715 0 6.2002
1 -1 1 11 0 0 0.69 -2.4999 10993.7998 10993.80 0.000511 0 0 0
2 -1 1 11 0 0 -0.69 2.4999 6.5852 7.08 0.000511 0 0 0
2 1 1 1 1 0.650745 0.00159988 3.52285 21.4844 17.5986
1 -1 1 11 0 0 -4.20 0.3862 10982.4004 10982.40 0.000511 -0.000456454 0.00077441 0
2 -1 1 11 0 0 3.45 0.8800 12.4191 12.92 0.000511 -0.000456454 0.00077441 0
2 1 1 1 1 0.650745 0.00159988 3.52285 21.4844 17.5986
1 -1 1 11 0 0 -4.20 0.3862 10982.4004 10982.40 0.000511 -0.000456454 0.00077441 0
2 -1 1 11 0 0 0.75 -1.2666 2.1155 2.58 0.000511 0 0 0
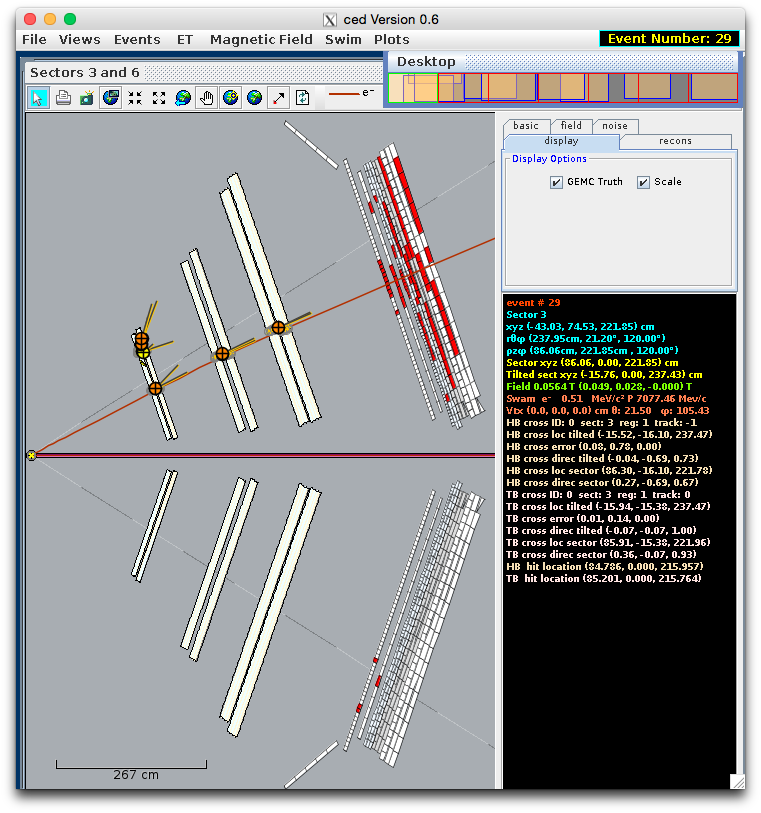
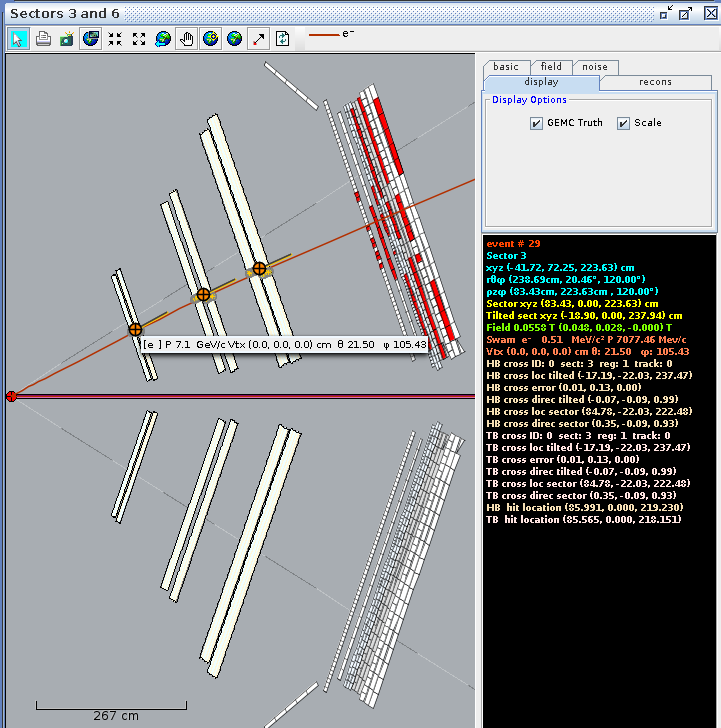
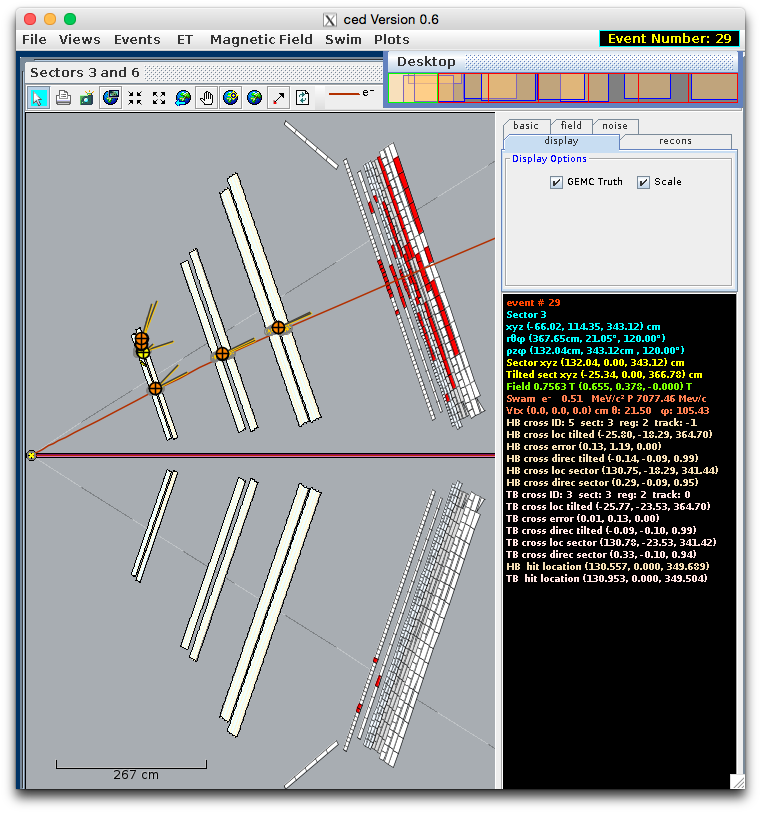
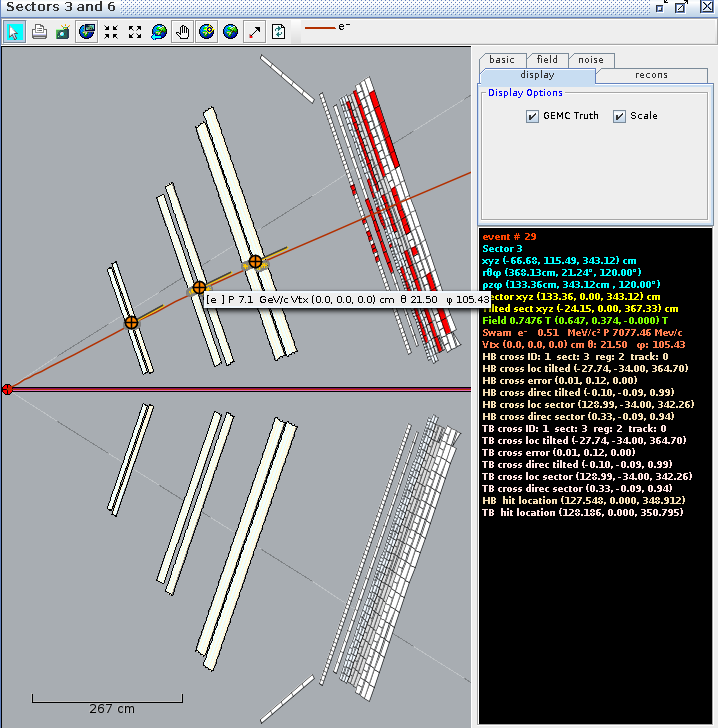
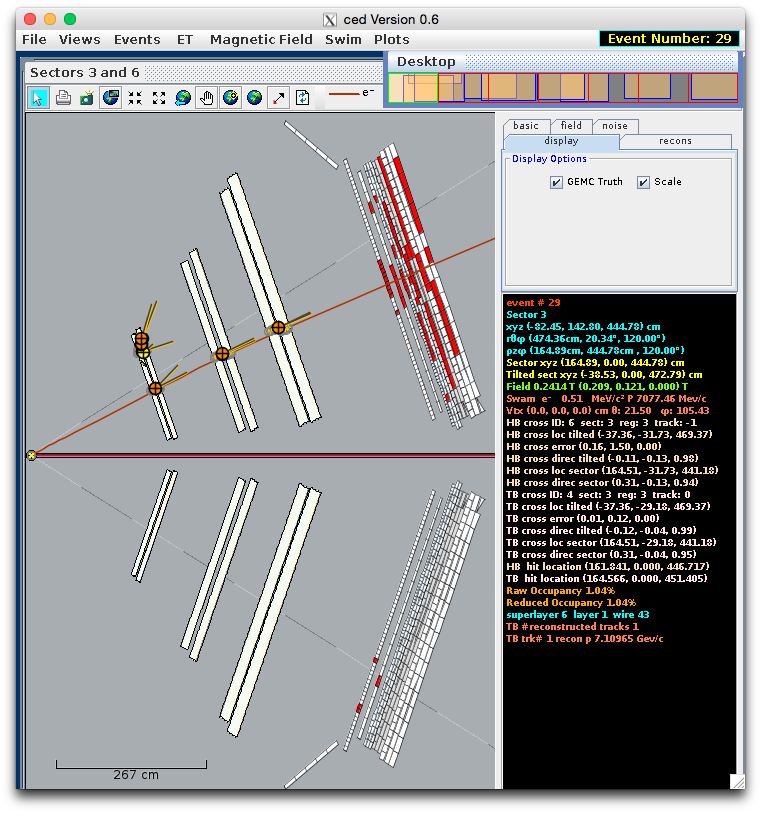
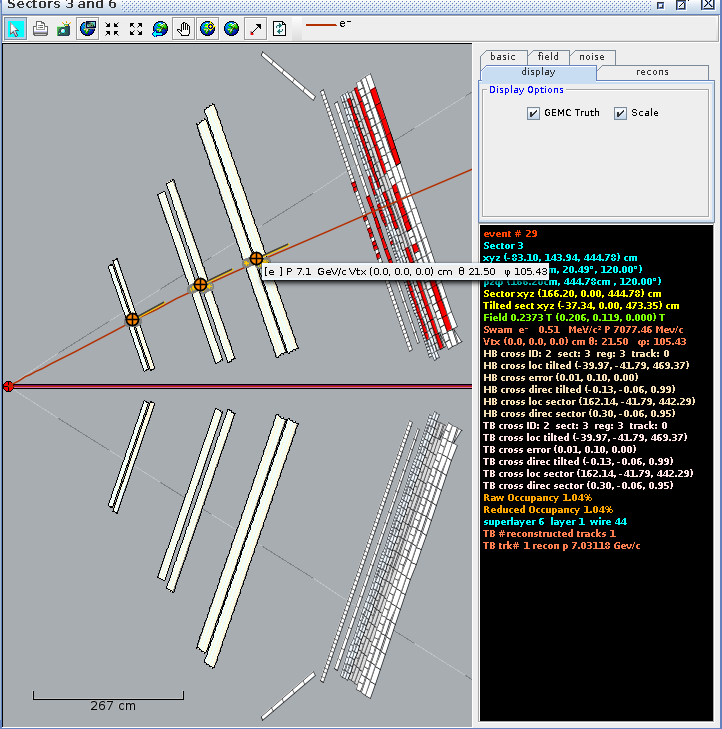
Picture of ced output for event 29
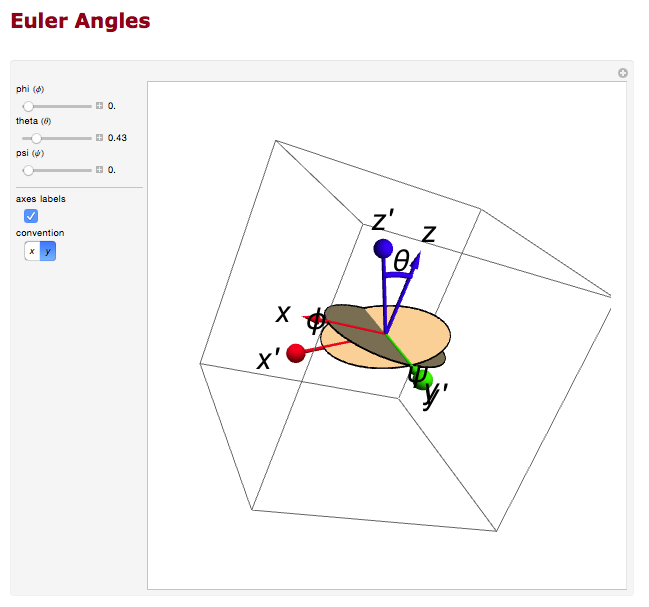
Transformation Matrix
[math]\left(
\begin{array}{ccc}
\cos (\theta ) & 0 & -\sin (\theta ) \\
0 & 1 & 0 \\
\sin (\theta ) & 0 & \cos (\theta ) \\
\end{array}
\right).\left(
\begin{array}{c}
x \\
y \\
z \\
\end{array}
\right)[/math]
[math]\!\(
TagBox[
RowBox[{"(", "", GridBox[{
{
RowBox[{
RowBox[{"x", " ",
RowBox[{"Cos", "[", "\[Theta]", "]"}]}], "-",
RowBox[{"z", " ",
RowBox[{"Sin", "[", "\[Theta]", "]"}]}]}]},
{"y"},
{
RowBox[{
RowBox[{"z", " ",
RowBox[{"Cos", "[", "\[Theta]", "]"}]}], "+",
RowBox[{"x", " ",
RowBox[{"Sin", "[", "\[Theta]", "]"}]}]}]}
},
GridBoxAlignment-\gt {
"Columns" -\gt {{Center}}, "ColumnsIndexed" -\gt {},
"Rows" -\gt {{Baseline}}, "RowsIndexed" -\gt {}},
GridBoxSpacings-\gt {"Columns" -\gt {
Offset[0.27999999999999997`], {
Offset[0.7]},
Offset[0.27999999999999997`]}, "ColumnsIndexed" -\gt {}, "Rows" -\gt {
Offset[0.2], {
Offset[0.4]},
Offset[0.2]}, "RowsIndexed" -\gt {}}], "", ")"}],
Function[BoxForm`e$,
MatrixForm[BoxForm`e$]]]\)[/math]
DV_RunGroupC_Moller#Moller_Track_Reconstruction







