|
|
| Line 99: |
Line 99: |
| | | | |
| | | | |
| − | <center><math>=\biggl[(\frac{dp^{*3}\cos{\theta^*}^2\sin{\phi^*}\\cos{\phi^*}\sin{\theta^*})}{dp^*d\theta^*d\phi^*)}\biggr]^{-1}</math></center> | + | <center><math>=\biggl[(\frac{dp^{*3}\cos{\theta^*}^2\sin{\phi^*}\cos{\phi^*}\sin{\theta^*})}{dp^*d\theta^*d\phi^*)}\biggr]^{-1}</math></center> |
| | | | |
| | | | |
| | <center><math>\left( \begin{matrix} E_1^*+E_2^* \\ p^*_{1(x)}+p^*_{2(x)} \\ p^*_{1(y)}+p^*_{2(y)} \\ p^*_{1(z)}+p^*_{2(z)}\end{matrix} \right)=\left(\begin{matrix}\gamma^* & 0 & 0 & -\beta^* \gamma^*\\0 & 1 & 0 & 0 \\ 0 & 0 & 1 &0 \\ -\beta^*\gamma^* & 0 & 0 & \gamma^* \end{matrix} \right) . \left( \begin{matrix}E_{1}+E_{2}\\ p_{1(x)}+p_{2(x)} \\ p_{1(y)}+p_{2(y)} \\ p_{1(z)}+p_{2(z)}\end{matrix} \right)</math></center> | | <center><math>\left( \begin{matrix} E_1^*+E_2^* \\ p^*_{1(x)}+p^*_{2(x)} \\ p^*_{1(y)}+p^*_{2(y)} \\ p^*_{1(z)}+p^*_{2(z)}\end{matrix} \right)=\left(\begin{matrix}\gamma^* & 0 & 0 & -\beta^* \gamma^*\\0 & 1 & 0 & 0 \\ 0 & 0 & 1 &0 \\ -\beta^*\gamma^* & 0 & 0 & \gamma^* \end{matrix} \right) . \left( \begin{matrix}E_{1}+E_{2}\\ p_{1(x)}+p_{2(x)} \\ p_{1(y)}+p_{2(y)} \\ p_{1(z)}+p_{2(z)}\end{matrix} \right)</math></center> |
Revision as of 03:12, 3 February 2016
Scattering Cross Section
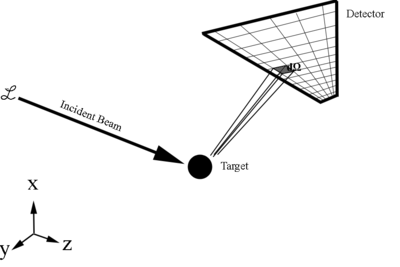
[math]\frac{d\sigma}{d\Omega} = \frac{\left(\frac{number\ of\ particles\ scattered/second}{d\Omega}\right)}{\left(\frac{number\ of\ incoming\ particles/second}{cm^2}\right)}=\frac{dN}{\mathcal L\, d\Omega} =differential\ scattering\ cross\ section[/math]
[math]where\ d\Omega=\sin{\theta}\,d\theta\,d\phi[/math]
[math]\Rightarrow \sigma=\int\limits_{\theta=0}^{\pi} \int\limits_{\phi=0}^{2\pi} \left(\frac{d\sigma}{d\Omega}\right)\ \sin{\theta}\,d\theta\,d\phi =\frac{N}{\mathcal L}\equiv total\ scattering\ cross\ section[/math]
Since this is just a ratio of detected particles to total particles, this gives the cross section as a relative probablity of a scattering, or reaction, to occur.
Transforming Cross Section Between Frames
Transforming the cross section between two different frames of reference has the condition that the quantity must be equal in both frames. This is due to the fact that
[math]\sigma=\frac{N}{\mathcal L}=constant\ number[/math]
This makes the total cross section a Lorentz invariant in that it is not effected by any relativistic transformations
[math]\therefore\ \sigma_{CM}=\sigma_{Lab}[/math]
This implies that the number of particles going into the solid-angle element d ΩLab and having a momentum between pLab and pLab+dpLabbe the same as the number going into the corresponding solid-angle element dΩCM and having a corresponding momentum between pCM and pCM+dpCM
[math]\frac{d^2\sigma_{Lab}}{dp_{Lab}\,d\Omega_{Lab}}dp_{Lab}\,d\Omega_{Lab}=\frac{d^2\sigma_{CM}}{dp_{CM}\, d\Omega_{CM}}dp_{CM}\, d\Omega_{CM}[/math]
[math]where\ d\Omega=\sin{\theta}\,d\theta\,d\phi[/math]
[math]\frac{d^2\sigma_{Lab}}{dp_{Lab}\,d\Omega_{Lab}}dp_{Lab}\,\sin{\theta_{Lab}}\,d\theta_{Lab}\,d\phi_{Lab}=\frac{d^2\sigma_{CM}}{dp_{CM}\, d\Omega_{CM}}dp_{CM}\, \sin{\theta_{CM}}\,d\theta_{CM}\,d\phi_{CM}[/math]
As shown earlier,
[math]\phi_{Lab}=\phi_{CM}[/math]
[math]\Rightarrow\ d\phi_{Lab}=d\phi_{CM}[/math]
[math]\frac{d^2\sigma_{Lab}}{dp_{Lab}\,d\Omega_{Lab}} dp_{Lab}\,\sin{\theta_{Lab}}\,d\theta_{Lab}=\frac{d^2\sigma_{CM}}{dp_{CM}\, d\Omega_{CM}}dp_{CM}\, \sin{\theta_{CM}}\,d\theta_{CM}[/math]
We can use the fact that
[math]\sin{\theta}\ d\theta=d(\cos{\theta})[/math]
[math]\frac{d^2\sigma_{Lab}}{dp_{Lab}\,d\Omega_{Lab}} dp_{Lab}\,d(\cos{\theta_{Lab}})=\frac{d^2\sigma_{CM}}{dp_{CM}\, d\Omega_{CM}}dp_{CM}\, d(\cos{\theta_{CM}})[/math]
[math]\frac{d^2\sigma_{Lab}}{dp_{Lab}\,d\Omega_{Lab}} =\frac{d^2\sigma_{CM}}{dp_{CM}\, d\Omega_{CM}} \frac{dp_{CM}\,d(\cos{\theta_{CM}})}{dp_{Lab}\,d(\cos{\theta_{Lab}})}[/math]
[math]\frac{d^2\sigma_{Lab}}{dp_{Lab}\,d\Omega_{Lab}} =\frac{d^2\sigma_{CM}}{dp_{CM}\, d\Omega_{CM}} \frac{d(p_{CM}\,\cos{\theta_{CM})}}{d(p_{Lab}\,\cos{\theta_{Lab}})}[/math]
We can use the chain rule to find the transformation term on the right hand side:
[math]\frac{d(p^*\,\cos{\theta^*)}}{d(p^*\theta^*\phi^*)} \frac{d(p^*\theta^*\phi^*)}{d(p^*_xp^*_yp^*_z)} \frac{d(p^*_xp^*_yp^*_z)}{d(p_xp_yp_z)} \frac{d(p_xp_yp_z)}{d(p\theta\phi)} \frac{d(p\theta\phi)}{d(p\,\cos{\theta})}=\frac{d(p^*\cos{\theta^*})}{d(p\cos{\theta})}[/math]
[math]\frac{d(p^*\cos{\theta^*})} {d(p^*\theta^*\phi^*)}=\frac{dp^* \sin{\theta^*} d\theta^* d\phi^*}{dp^*d\theta^*d\phi^*}=\sin{\theta^*}[/math]
Using the conversion of cartesian to spherical coordinates we know:
[math]\begin{cases}
p_x=p\sin{\theta}\cos{\phi} \\
p_y=p\sin{\theta}\sin{\phi} \\
p_z=p\cos{\theta}
\end{cases}[/math]
This allows us to express the term:
[math]\frac{d(p^*\theta^*\phi^*)}{d(p^*_xp^*_yp^*_z)}=\biggl[(\frac{d(p^*_xp^*_yp^*_z)}{d(p^*\theta^*\phi^*)}\biggr]^{-1}=\biggl[(\frac{d(p^*\sin{\theta^*}\cos{\phi^*}p^*\sin{\theta^*}\sin{\phi^*}p^*\cos{\theta^*})}{dp^*d\theta^*d\phi^*)}\biggr]^{-1}[/math]
[math]=\biggl[(\frac{dp^{*3}\cos{\theta^*}^2\sin{\phi^*}\cos{\phi^*}\sin{\theta^*})}{dp^*d\theta^*d\phi^*)}\biggr]^{-1}[/math]
[math]\left( \begin{matrix} E_1^*+E_2^* \\ p^*_{1(x)}+p^*_{2(x)} \\ p^*_{1(y)}+p^*_{2(y)} \\ p^*_{1(z)}+p^*_{2(z)}\end{matrix} \right)=\left(\begin{matrix}\gamma^* & 0 & 0 & -\beta^* \gamma^*\\0 & 1 & 0 & 0 \\ 0 & 0 & 1 &0 \\ -\beta^*\gamma^* & 0 & 0 & \gamma^* \end{matrix} \right) . \left( \begin{matrix}E_{1}+E_{2}\\ p_{1(x)}+p_{2(x)} \\ p_{1(y)}+p_{2(y)} \\ p_{1(z)}+p_{2(z)}\end{matrix} \right)[/math]
